算法介绍
人脸对齐就是在已经检测到的人脸的基础上,自动找到人脸上的眼睛鼻子嘴和脸轮廓等标志性特征位置,通过这一手段可以衍生出很多产品应用,包括美图软件、魔漫相机、表情检测和性别检测等。目前有很多的人脸对齐算法,比较传统的有ASM、AAM、CLM和一些列改进算法,而目前比较流行的有ESR、3D-ESR、SPR、LBF、SDM、CFSS等。这里将详细介绍分析SDM算法,具体参考论文Supervised Descent Method and its Applications to Face Alignment 。
SDM人脸对齐算法属于回归方法,基于回归的方法的基本原理:对于一张给定的人脸,给出一个初始的形状,通过不断地迭代,将初始形状回归到接近甚至等于真实形状的位置。
事实上SDM并非是一种人脸对齐方法,而是一种监督下降方法,用于解决非线性最小化问题。
解决非线性最优化问题通常有2个难点:
(1)方程不可微,计算量太大;
(2)Hessian矩阵太大,不是正定矩阵。
基于这样的难点,作者提出了自己的SDM方法,可以用于解决上述的问题,并成功解决了人脸对齐中关键点的回归问题,具体示意图如下: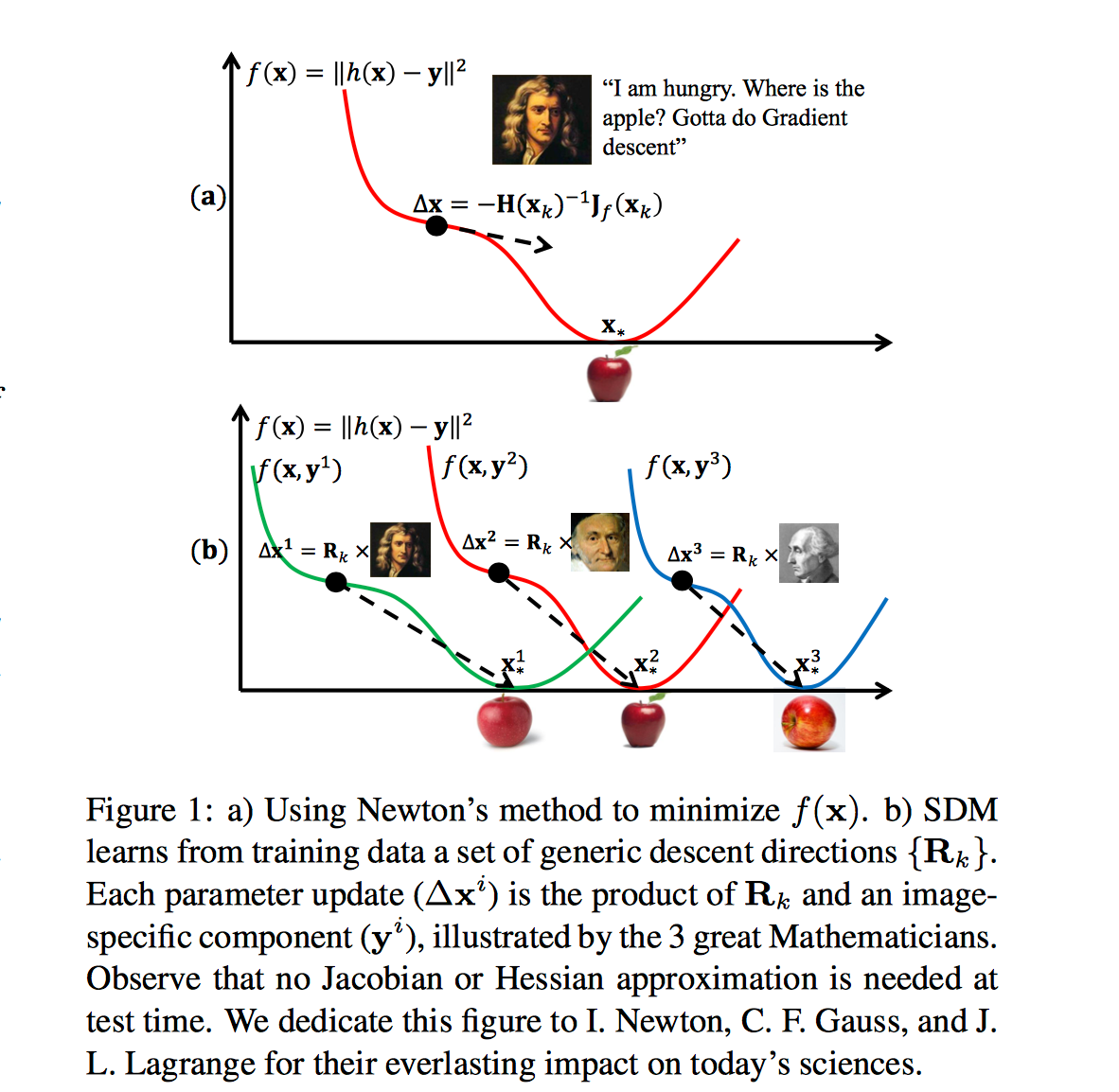
如上图a所示,传统解决最小化二乘问题的方法就是牛顿下山法,通过牛顿迭代,最终可以找到一个全局最小值。这样的迭代也肯定是效果最好的,但是在实际工程应用中,是不会有足够的计算资源来将所有样本一下都计算进去的,于是就有了上图b的方法,更新每一个Δx,每次都会找到一个最小值,然后不断迭代,减少最小值之间的误差距离,最终就会找到全局最小值,类似深度学习里的Mini batch SGD。
给定一张含有m个像素的图片,h表示一个非线性特征提取函数。那么我们的目标就是,在给定一个初始形状x0的基础上,通过回归的方法,将x0回归到该人脸正确的形状x∗上,用数学的方式表达,即为求得使下面的f(x0+Δx)最小的Δx:
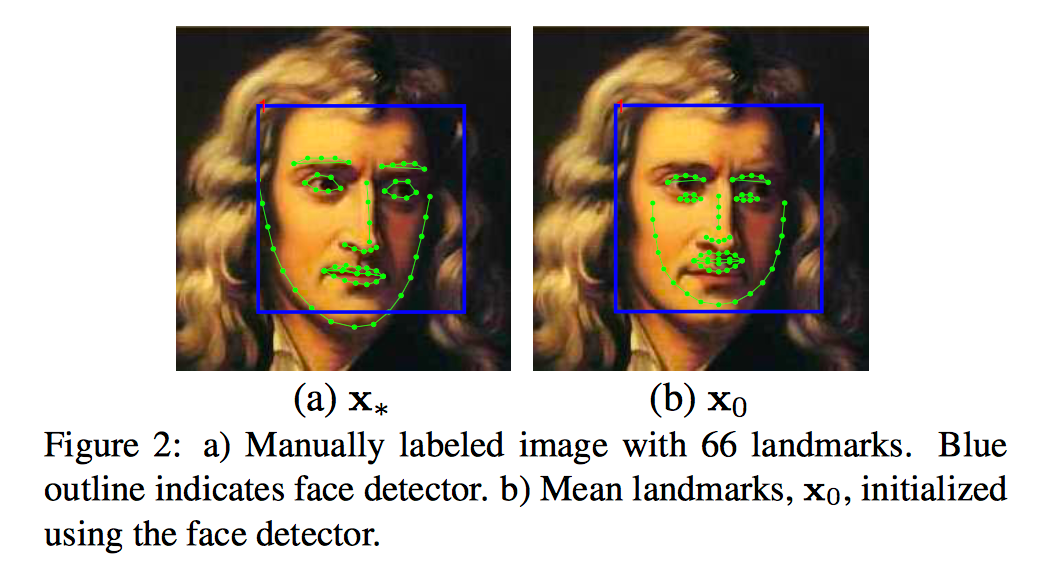
那么问题来了,如果每一张脸的初始形状都是一样的(即都是已知样本的真实形状的平均形状),那么怎么让它们回归到各自人脸的真实形状呢,答案就是每张图片提取出的不同的SIFT特征(具体采用什么特征可以依据情况而定,论文中 采用了SIFT特征,但也可以采用如HOG,DOG,甚至LBF等特征)了,虽然采用了相同的初始形状,但在不同的图片上,相同的初始形状所提取出的SIFT特征是完全不同的,也就是ϕ0是不同的,这样就可以通过回归器将其回归到各自的真实形状上了。
现在我们的优化目标,就是要得到一个回归器,这个回归器能起到的作用是将一个初始形状回归到真实形状上去。也就是学到正确的回归器使其得到最好的Δx 。当然想要从初始形状一步步回归到真实形状,只学习一个Δx一般是不行的,因为一步就回归到最小点一般来说要求比较高,即使是牛顿步回归的比较快,通常也不能一步就达到目标。所以我们要学习得到多个不同的回归器,它们依次回归下来,能得到一系列的Δx,这样我们就能很快根据xk+1=xk+Δx得到使目标函数最小的点。
我们使用的是从初始特征点周围提取的SIFT特征作为第一次回归的输入,然而SIFT算子是不可导的,所以如果想要使用一阶或者二阶方法来最小化上面的目标函数,那就只能用数值逼近的方法来估计Jacobian和Hessian矩阵(比如有限差分方法等)。然而数值估计计算量非常大,所以我们要采用SDM方法来学习下降的方向和下降的尺度,或者说学习Jaobian和Hessian矩阵。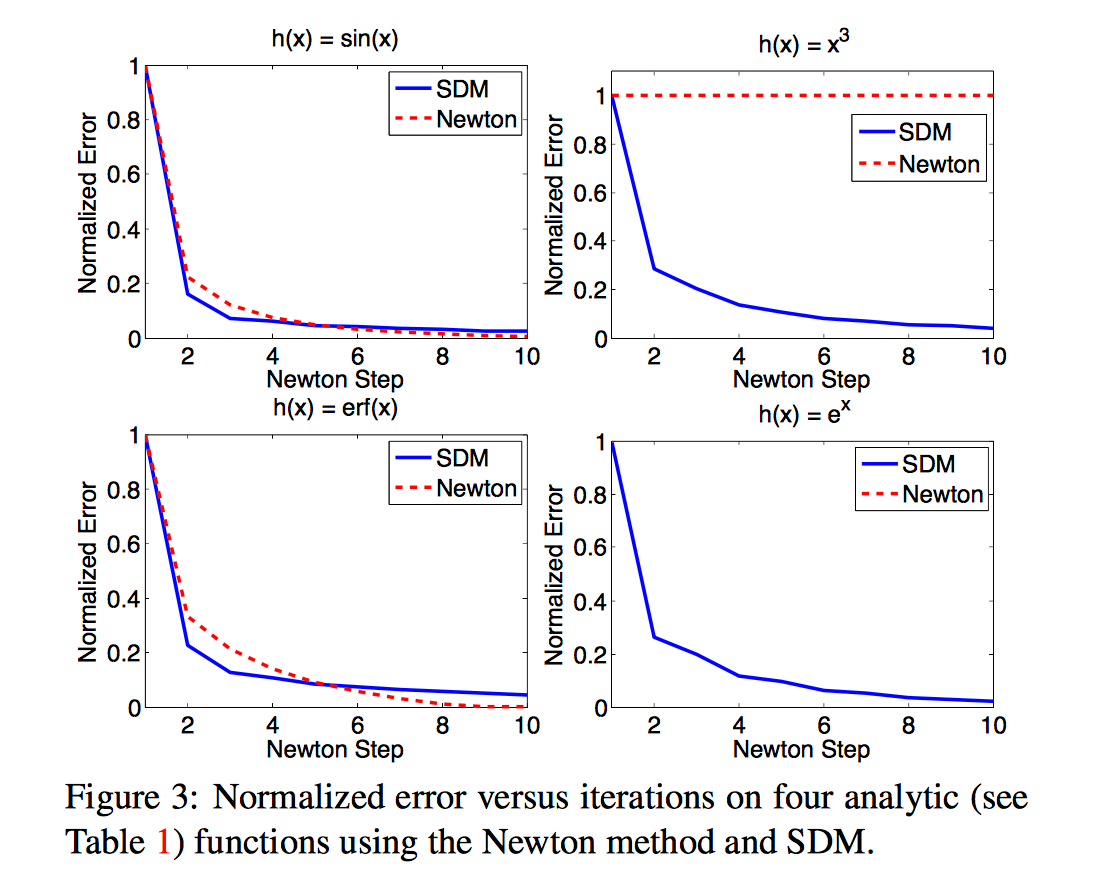
由上图可知SDM的收敛速度比牛顿步更快,只是收敛得最终结果并没有达到最优(比牛顿步差一点),但SDM更具鲁棒性,在函数的Hessian矩阵不是正定的时候,SDM也能很快收敛。
工程示例
使用OpenCV的HarrCascade做检脸,SDM做landmark,标出eyes、nose和left/right mouth,最终结果输出如下:
参考文章:
http://blog.csdn.net/jiajinrang93/article/details/68937710
